豊橋から始まる「ロボットの社会実装」
こうした「技術と現場のギャップ」を埋めるため、国立大学法人 豊橋技術科学大学の情報・知能工学系助教である林宏太郎さんが、愛知県の補助金を受け、愛知県豊橋市の就労支援施設「NPO法人クオーレ」で福祉現場支援ロボットの実証実験をスタートさせました。

これまでの福祉現場では、支援者一人ひとりの経験や勘が、利用者さんを支える大きな力となってきました。この研究は、それを否定するのではなく、経験値に「見える根拠」と「再現性」をプラスすることで、誰が関わっても一定の質を保てる支援の未来を目指しています。ロボットは人に取って代わる存在ではなく、支援の質を支える「もう一つの目」として位置づけられているんです。
高機能より「本当に使える最小限」を
林助教は、約20年前からコミュニケーションロボットの研究に取り組んでいます。多くのロボットが高機能すぎて現場で使いこなせない現状を見て、「技術的にできることは増えているのに、導入が進まないのは、現場の運用や衛生、教育コスト、保守まで含めた設計になっていないからだと思います。だからこそ、過度な機能追加ではなく、必要最小限で現場に適合することを優先しています」と語っています。

この考えに基づき、今回の研究ではあえて機能を「最小限」に絞り込み、面接練習やバイタル見守りなど、福祉現場が本当に求める要素を形にした「本当に使えるロボット技術」の普及を目指しています。さらに、福祉現場で必須となる「洗える・拭ける」といった衛生要件も、重要なテーマとして取り組まれています。
3つの画期的なソリューション
実証実験では、福祉現場に必要な機能を「新しく導入する」のではなく、「本当に必要な要素だけ」を統合・簡素化して普及可能な形にするアプローチで、以下の3つのソリューションを検証しています。

会話ロボット「HUSK T(ハスクティー)」
「HUSK T」は、就労支援施設での面接練習(自己PRや受け答えの練習)を主な用途に設計された会話ロボットです。
対人で緊張しやすい利用者さんにとって、いきなり人相手の面接練習は心理的なハードルが高いことがあります。そこで「まずロボット相手に練習する」という段階を設けることで、負担を軽減しながら練習を重ねられる可能性があります。
このロボットには、対話を通じた面接練習機能、目の開閉によるターンテイキング(話す・聞くの切り替え)支援、そして1分30秒スピーチの評価機能(現在も改善中)といった特徴があります。名前の「HUSK T」は、日本の古語で「力強い目」を表す「赤酸漿(ほおずき)」の英語名(Husk Tomato)に由来しているそうです。
うなずき可視化
人の会話では、言葉だけでなく、うなずきや視線といった非言語情報がコミュニケーションを支えています。しかし、音声認識だけでは会話の切れ目を正確に捉えるのが難しく、実際の会話の「受け渡し」は視線や相づちで成り立っている部分が大きいと言われています。
そこでこの研究では、頭部の上下動をセンサーで計測し、うなずきの回数や動作量を「見える化」する仕組みを試作しました。小型デバイスで頭部の上下動を計測し、うなずきをカウントします。「1オフ=1カウント」(連続したうなずきも1カウント扱い)という独自の基準で、相手の反応が見えづらい状況でもデータとして把握できるようになります。これにより、練習や支援の質を高める狙いです。
バイタル測定・見守り
うなずき可視化システムを応用することで、日常動作の検知による見守りも可能になりました。重装備な医療機器ではなく、薬ケースの開閉や扉の開閉といった「現場で起きる重要な行動」を確実に拾うことを目指しています。
例えば、薬ケースの開閉回数から服薬状況を把握したり(開いていない=未服薬の可能性)、深夜の不審な扉の開閉を検知したりできます。小型センサーを使うことで利用者さんの負担も少なく、「高価で多機能な見守り」ではなく、現場で運用しやすい形での実装を志向しています。

NPO法人クオーレが示す新しいモデル
福祉業界では、ロボット導入は「コストが高い」「操作が難しい」と敬遠されがちです。その中で、NPO法人クオーレが実証実験のパートナーとして名乗りを上げたことには、大きな意義があります。
-
「ユーザー」ではなく「開発パートナー」としての参画
クオーレはロボットをただ導入するだけでなく、現場のニーズを技術者にフィードバックし、仕様を共に作り上げる「共創パートナー」として関わっています。これにより、研究室だけでは気づけない「衛生面(拭き取りやすさ)」や「長期保守の重要性」が設計に反映されています。 -
就労支援における「心理的ハードル」の解消
障害のある方々にとって、対人での面接練習は大きな緊張を伴います。クオーレは「まずロボット相手に練習する」というワンクッションを設けることで、利用者さんの心理的安全性を確保し、スムーズな社会進出を支援する新しい就労支援モデルを構築しています。 -
地域発「産学官連携」の先駆的モデル
豊橋技術科学大学の技術を、地元のNPO法人が社会実装し、それを愛知県が支援する。この「豊橋モデル」は、全国の人手不足に悩む福祉施設の希望となる先駆的な事例になることでしょう。
NPO法人クオーレの公式HPはこちらです。
https://npo-cuore.com/
現場テストの手応えと未来
2025年12月22日には、実際の利用者さんが活動する時間帯に合わせた現場テストが行われました。利用者さんが大葉の仕分け作業を行っている際に、作業空間にデバイスを設置し、頭部の上下動(うなずき)を測定。利用者さんの集中度やリズム、スタッフさんとのコミュニケーションの質を客観的に把握できるか検証しました。
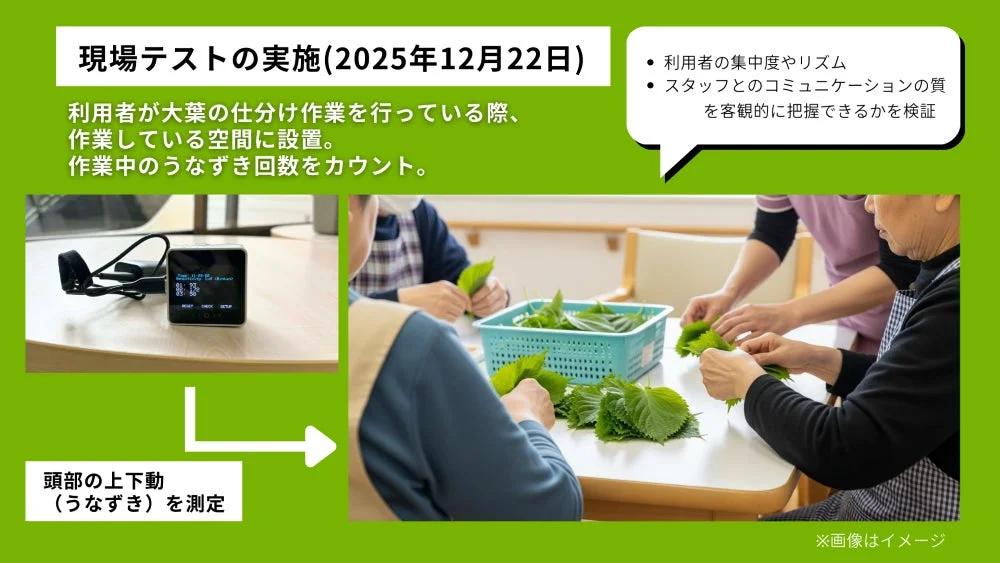
結果として、「1動作=1カウント」という独自のアルゴリズムにより、連続した動きの中でも正確にうなずきを捉えることに成功。現場スタッフさんが独自の評価基準を設定し、データに基づいた的確なフィードバックを行える手応えを得られたそうです。
現場テストの結果を踏まえ、この研究は社会実装の第2フェーズへと移行します。現在、就労支援施設だけでなく、高齢者施設、教育現場、対話による販促を行うキッチンカーなど、本システムを試用できる現場を広く募集しています。現場の担当者が実際に使ってみて課題を抽出する「POC(概念実証)」を重視しているとのことです。
普及へのカギは「長期保守」と「コーディネーター」
福祉現場では、導入した機器を「10年、できれば20年使いたい」という強い要望があります。しかし、制御基板やAI関連の機器はモデル更新が早く、旧型のサポートが限定的になることも少なくありません。林助教は、この「長期保守」が普及における現実的な課題だと指摘しています。
「福祉現場は長期保守が前提。でも部品供給や修理体制は短期更新の思想が強い。ここにギャップがある限り、いくら性能が高くても現場は導入しにくい」
この研究では、耐久性や供給継続性の観点から部品選定も行い、現場での長期運用を見据えた検証が進められています。
また、ロボット導入を成功させるには、施設長や経営層の判断だけでなく、現場の担当者の協力と実機試用が重要です。さらに、現場と技術者の間に立って仕様を整理し、課題を切り分ける「橋渡し役」となるコーディネーターの存在も欠かせないとのこと。分野ごとの専門性を持つコーディネーターの育成が、普及のボトルネック解消につながる可能性を秘めています。
ロボットが「もう一つの目」として福祉現場を支える未来へ
この「豊橋モデル」は、単なる技術検証にとどまらず、NPO法人という「現場の最前線」が主導し、大学(研究機関)との協働によって進められています。行政(愛知県)も情報共有を通じて支援しており、「本当に現場で定着する福祉ロボットのあり方」を地域、ひいては全国に先駆けて提示することを目指しています。ロボットが福祉現場の「もう一つの目」として、利用者さんと支援者さん双方にとってより良い未来を築いていくことに期待が高まりますね。